 RUST
RUST RUSTの製油所を工業システムで自動化
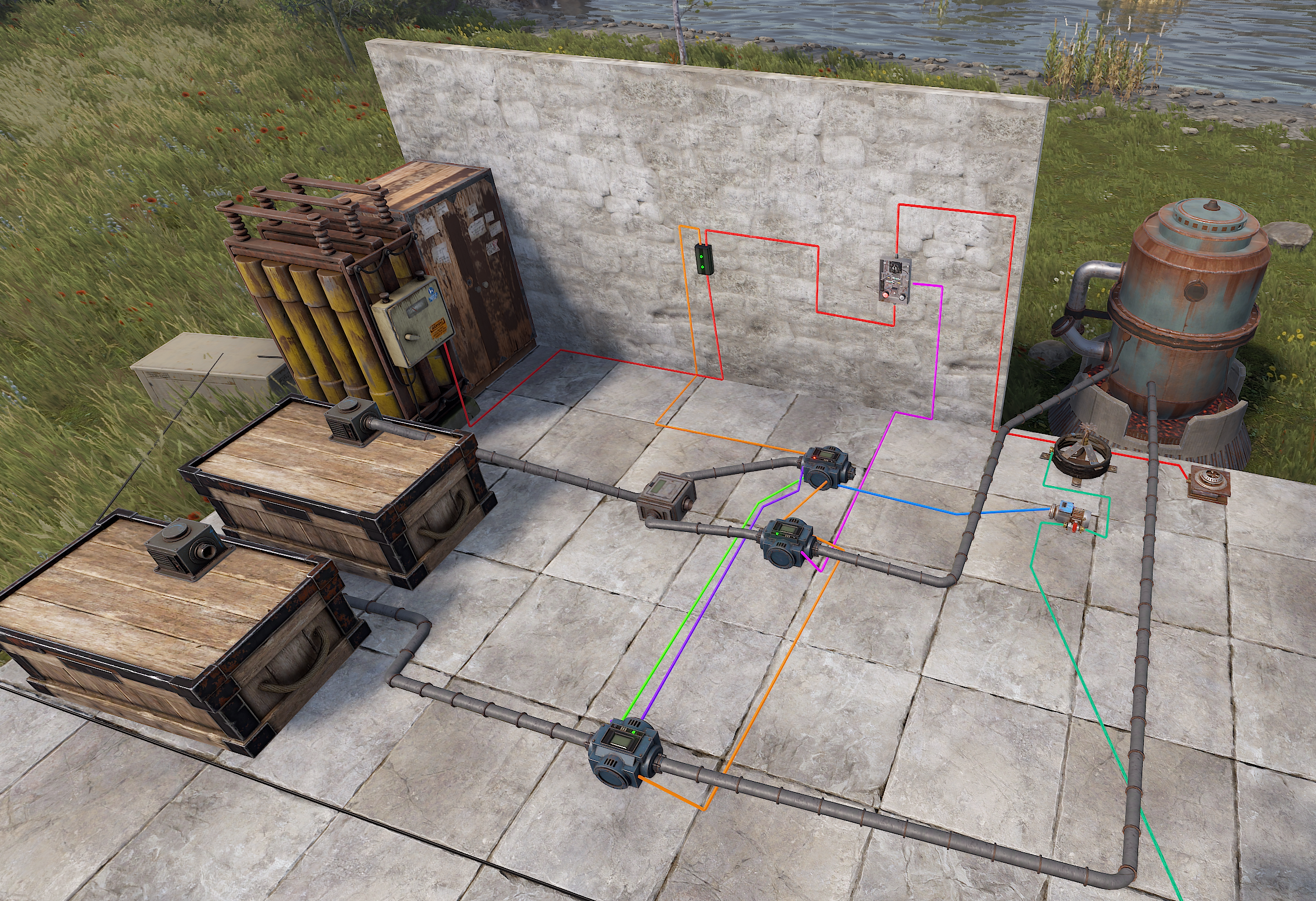
原油の精油の完全自動化をする回路を作ってみたRUSTの原油と木材を箱に放り込むだけで、・製油所への原油と木材の輸送・製油所の自動点火・低質燃料と木炭の自動回収・精油が終わったあとの自動消火をする回路を考えてみました。使ってみてもらえると嬉し...
RUST  CitiesSkylines
CitiesSkylines  RUST
RUST  RUST
RUST  TransportFever2
TransportFever2  RUST
RUST  RUST IT IT RUST
RUST IT IT RUST